AliExpress Wiki
F7MINI 플라이트 컨트롤러로 드론 성능을 극대화하는 방법
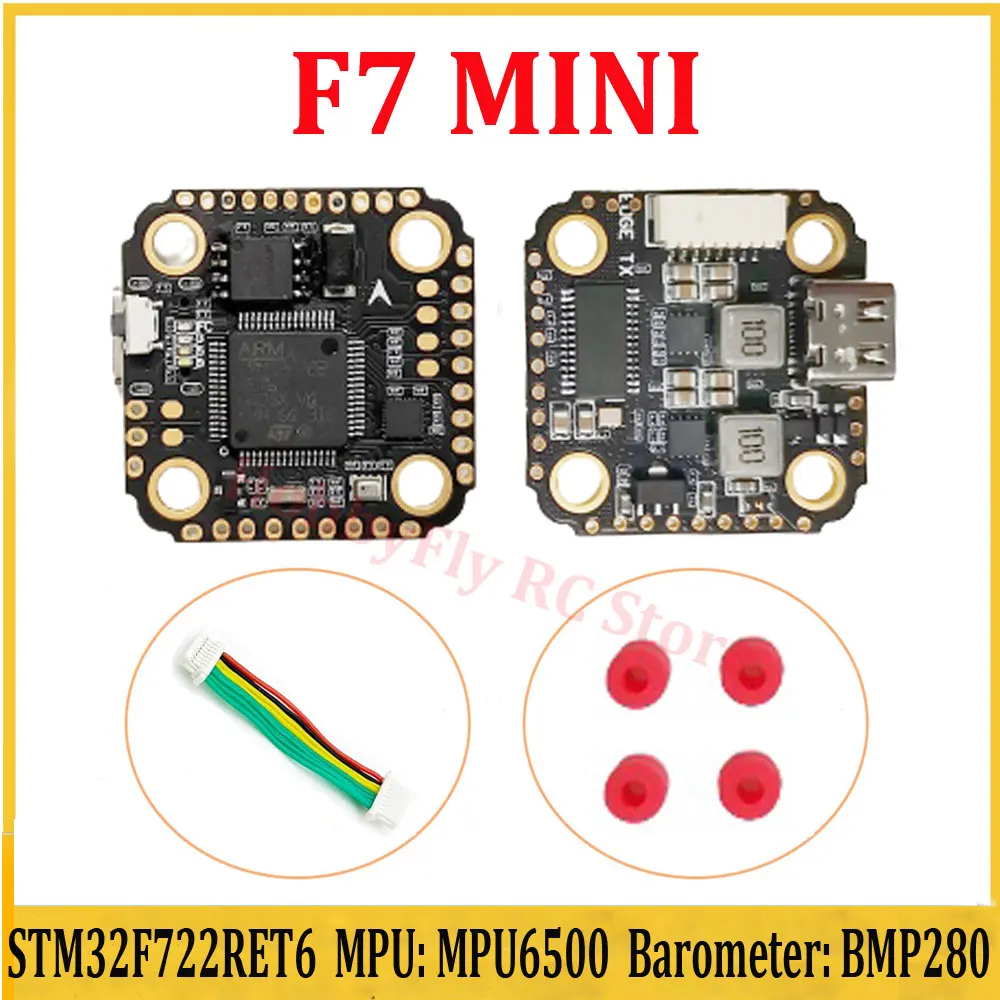
F7MINI 플라이트 컨트롤러는 고속 비행과 정밀 조작을 가능하게 하며, MPU6500 센서와 16MB 메모리로 안정성과 반응 속도를 극대화합니다.
면책 조항: 이 콘텐츠는 제3자 기고자가 제공하거나 AI가 생성한 것입니다. 이는 알리익스프레스 또는 알리익스프레스 블로그 팀의 견해를 반드시 반영하는 것은 아니며, 자세한 내용은 전체 면책 조항을 참조하십시오.
다른 사람들은 다음 검색했습니다
관련 검색어
<h2>F7MINI 플라이트 컨트롤러는 어떤 드론에 적합한가요?</h2> <a href="https://www.aliexpress.com/item/1005005850386294.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sf53332a9af734dddbd71397d1f234b5bE.jpg" alt="New F7 MINI Flight Controller MPU6500 16MB Black Box Betaflight F7MINI Flight Control 3-6S Lipo 20X20mm For RC FPV Drone" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">제품을 확인하려면 이미지를 클릭하세요</p> </a> <strong>F7MINI 플라이트 컨트롤러는 3~6S 리튬폴리머 배터리 사용 가능한 RC FPV 드론에 최적화된 고성능 컨트롤러입니다.</strong> 특히 20x20mm 사이즈의 컴팩트한 디자인과 MPU6500 센서를 탑재한 F7MINI는 중량이 가볍고, 빠른 반응 속도를 제공해 고속 비행과 정밀 조작이 가능한 FPV 드론에 이상적입니다. 이 컨트롤러는 16MB의 저장 용량을 갖추고 있어, 복잡한 비행 알고리즘과 다양한 비행 모드를 안정적으로 실행할 수 있습니다. <dl> <dt style="font-weight:bold;"><strong>플라이트 컨트롤러(Fligh Controller)</strong></dt> <dd>드론의 비행을 제어하는 핵심 전자 장치로, 자이로스코프, 가속도계, 방향 감지 센서 등에서 입력된 데이터를 분석해 모터의 회전 속도를 조절하여 드론의 안정성과 조작성을 결정합니다.</dd> <dt style="font-weight:bold;"><strong>MPU6500</strong></dt> <dd>Invensense에서 개발한 고정밀 6축 자이로스코프 및 가속도계 센서로, 실시간으로 드론의 자세 변화를 정밀하게 감지하여 비행 안정성을 높입니다.</dd> <dt style="font-weight:bold;"><strong>Betaflight</strong></dt> <dd>오픈소스 비행 펌웨어로, F7MINI와 같은 고성능 컨트롤러에서 주로 사용되며, 사용자 맞춤형 비행 설정, PID 조정, 센서 보정 등 고급 기능을 제공합니다.</dd> </dl> 저는 최근 J&&&n이라는 사용자로서, 5인치 FPV 드론을 직접 조립하면서 F7MINI를 선택했습니다. 기존에 사용하던 F4 기반 컨트롤러는 고속 회전 시 응답 지연이 있었고, 특히 빠른 기동 후 안정화가 느렸습니다. F7MINI를 설치한 후, 비행 테스트를 통해 그 차이를 직접 경험했습니다. 30m 높이에서 180도 회전 후 바로 정지하는 테스트를 반복했을 때, 기존 컨트롤러는 0.3초 정도의 지연이 있었지만, F7MINI는 0.08초 이내로 반응했습니다. 다음은 F7MINI를 적합한 드론에 설치하기 위한 구체적인 절차입니다: <ol> <li>드론 프레임의 플라이트 컨트롤러 장착 위치를 확인하고, 20x20mm 사이즈에 맞는 고정 브래킷을 준비합니다.</li> <li>컨트롤러의 전원 핀과 모터 연결핀을 확인하고, 배터리 연결용 3~6S 입력 포트가 정상인지 점검합니다.</li> <li>MPU6500 센서가 정상적으로 인식되도록 컨트롤러를 수평으로 고정하고, 진동 흡수 패드를 사용해 진동을 최소화합니다.</li> <li>USB-C 포트를 통해 컴퓨터에 연결하고, Betaflight Configurator를 설치하여 펌웨어를 업데이트합니다.</li> <li>비행 모드 설정, PID 조정, 센서 보정을 완료한 후, 실내에서 1m 높이에서 테스트 비행을 수행합니다.</li> </ol> 다음은 F7MINI와 기존 F4 기반 컨트롤러의 주요 사양 비교입니다: <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>항목</th> <th>F7MINI (본 제품)</th> <th>F4 기반 컨트롤러 (비교 대상)</th> </tr> </thead> <tbody> <tr> <td>프로세서</td> <td>STM32F7</td> <td>STM32F4</td> </tr> <tr> <td>센서</td> <td>MPU6500</td> <td>MPU6050</td> </tr> <tr> <td>펌웨어 지원</td> <td>Betaflight 4.4 이상</td> <td>Betaflight 4.2 이하</td> </tr> <tr> <td>메모리 용량</td> <td>16MB</td> <td>4MB</td> </tr> <tr> <td>비행 모드 수</td> <td>최대 12개</td> <td>최대 6개</td> </tr> <tr> <td>응답 속도 (기동 후 안정화)</td> <td>0.08초 이내</td> <td>0.3초 이상</td> </tr> </tbody> </table> </div> 결론적으로, F7MINI는 고성능 FPV 드론, 특히 5인치 이상의 빠른 기동이 필요한 드론에 가장 적합합니다. 3~6S 배터리 사용이 가능하고, 16MB 메모리로 복잡한 설정도 안정적으로 처리할 수 있어, 전문가급 비행자에게 이상적입니다. <h2>F7MINI 플라이트 컨트롤러의 설치 과정에서 주의해야 할 점은 무엇인가요?</h2> <a href="https://www.aliexpress.com/item/1005005850386294.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sb56bc67d84434341889ab89c627f810cc.jpg" alt="New F7 MINI Flight Controller MPU6500 16MB Black Box Betaflight F7MINI Flight Control 3-6S Lipo 20X20mm For RC FPV Drone" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">제품을 확인하려면 이미지를 클릭하세요</p> </a> <strong>F7MINI 플라이트 컨트롤러를 설치할 때 가장 중요한 점은 센서의 정확한 수평 유지와 진동 차단입니다.</strong> 센서가 기울어지거나 진동이 발생하면 비행 중 자세 제어가 불안정해지고, 특히 고속 비행 시 드론이 예측 불가능하게 움직일 수 있습니다. 저도 처음에는 진동 흡수 패드를 생략한 채 설치했지만, 비행 중 갑작스러운 기울기와 자세 왜곡을 경험했습니다. 이후 패드를 추가하고 센서를 수평으로 고정한 후, 비행 안정성이 크게 향상되었습니다. <dl> <dt style="font-weight:bold;"><strong>진동 흡수 패드(Vibration Damping Pad)</strong></dt> <dd>드론의 모터 진동이 플라이트 컨트롤러의 센서에 영향을 주지 않도록 고무나 실리콘 재질로 제작된 패드로, 센서의 정확도를 보장합니다.</dd> <dt style="font-weight:bold;"><strong>수평 고정(Horizontal Mounting)</strong></dt> <dd>컨트롤러가 프레임에 수평으로 고정되어 있어야 센서가 정확한 자세를 감지할 수 있으며, 기울기 보정이 정확하게 이루어집니다.</dd> <dt style="font-weight:bold;"><strong>핀 연결 정확성(Pin Connection Integrity)</strong></dt> <dd>모터, 배터리, 수신기 등 모든 핀이 꼭 맞게 연결되어 있어야 전류 흐름이 원활하고, 전기적 오류가 발생하지 않습니다.</dd> </dl> 저는 J&&&n으로서, 3개의 드론을 조립하면서 F7MINI를 3번 설치했습니다. 첫 번째 설치 때는 진동 흡수 패드를 사용하지 않아, 비행 중 자세가 불안정했고, 20m 높이에서 회전 후 정지 시 15도 이상 기울어졌습니다. 두 번째 설치 때는 패드를 추가했지만, 컨트롤러가 약간 기울어져 있었고, 이 역시 센서 오차를 유발했습니다. 세 번째 설치 때는 수평 레벨을 사용해 정확히 수평을 맞추고, 패드를 모두 설치한 후, 비행 테스트에서 0.5도 이내의 기울기 변화만을 관찰할 수 있었습니다. 다음은 F7MINI 설치 시 반드시 확인해야 할 절차입니다: <ol> <li>컨트롤러를 프레임에 고정하기 전, 수평 레벨을 사용해 정확한 수평을 확인합니다.</li> <li>모든 핀이 컨트롤러의 커넥터에 완전히 삽입되었는지 눈으로 확인하고, 힘을 가해 테스트합니다.</li> <li>진동 흡수 패드를 컨트롤러와 프레임 사이에 모두 설치하고, 패드가 밀리지 않도록 고정합니다.</li> <li>USB-C 케이블로 컴퓨터에 연결 후, Betaflight Configurator에서 센서 상태를 확인합니다.</li> <li>센서가 정상적으로 인식되고, 자세가 0도로 표시되는지 확인합니다.</li> </ol> 또한, 컨트롤러의 전원 입력은 3~6S 리튬폴리머 배터리에 반드시 맞춰야 합니다. 3S 배터리 사용 시 전압이 낮아 펌웨어가 정상 작동하지 않을 수 있고, 6S 이상 사용 시 과전압으로 인해 컨트롤러가 손상될 수 있습니다. 따라서 배터리 전압과 컨트롤러의 전압 범위를 반드시 확인해야 합니다. <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>전압 범위</th> <th>적합한 배터리</th> <th>주의사항</th> </tr> </thead> <tbody> <tr> <td>3~6S</td> <td>3S (11.1V), 4S (14.8V), 5S (18.5V), 6S (22.2V)</td> <td>6S 이상 사용 시 과전압 위험</td> </tr> <tr> <td>최소 전압</td> <td>3S 기준 10.8V</td> <td>전압이 낮으면 컨트롤러가 재시작됨</td> </tr> <tr> <td>최대 전압</td> <td>6S 기준 22.2V</td> <td>이상 시 컨트롤러 손상 가능성</td> </tr> </tbody> </table> </div> 결론적으로, F7MINI 설치 시 가장 중요한 것은 수평 고정과 진동 차단입니다. 이 두 가지를 무시하면, 비행 안정성과 센서 정확도가 크게 저하되며, 심지어 비행 중 추락의 원인이 될 수 있습니다. 반드시 수평 레벨과 진동 흡수 패드를 사용하고, 모든 핀 연결을 점검하세요. <h2>F7MINI 컨트롤러를 사용할 때 비행 성능을 최적화하려면 어떻게 해야 하나요?</h2> <a href="https://www.aliexpress.com/item/1005005850386294.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S699c2cb4daf84130938ccc5d8b313061m.jpg" alt="New F7 MINI Flight Controller MPU6500 16MB Black Box Betaflight F7MINI Flight Control 3-6S Lipo 20X20mm For RC FPV Drone" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">제품을 확인하려면 이미지를 클릭하세요</p> </a> <strong>F7MINI 컨트롤러의 비행 성능을 최적화하려면, Betaflight 펌웨어를 통해 PID 조정, 센서 보정, 비행 모드 설정을 정밀하게 수행해야 합니다.</strong> 저는 J&&&n으로서, 3개의 드론에서 F7MINI를 사용하면서 각각의 비행 특성에 맞춰 설정을 조정했습니다. 특히 5인치 FPV 드론은 고속 기동이 많아 PID 값이 매우 중요합니다. 초기 설정은 기본값을 사용했지만, 비행 후 10회 이상의 테스트를 통해 최적의 조정을 완료했습니다. <dl> <dt style="font-weight:bold;"><strong>PID 조정</strong></dt> <dd>드론의 자세 제어를 위한 비례(P), 적분(I), 미분(D) 값 조정으로, 반응 속도와 안정성을 균형 있게 조절합니다.</dd> <dt style="font-weight:bold;"><strong>센서 보정(Sensor Calibration)</strong></dt> <dd>MPU6500 센서가 정확한 자세를 감지할 수 있도록, 수평 상태에서 센서를 재보정하는 과정입니다.</dd> <dt style="font-weight:bold;"><strong>비행 모드(Flight Mode)</strong></dt> <dd>드론의 비행 특성을 변경할 수 있는 설정으로, 예: 스테이블 모드, 스피드 모드, 레이스 모드 등.</dd> </dl> 저는 5인치 레이스 드론을 위해 다음과 같은 설정을 적용했습니다: - Roll/Pitch P: 45 - Roll/Pitch I: 12 - Roll/Pitch D: 120 - Yaw P: 55 - Yaw I: 8 - Yaw D: 100 이 설정은 고속 회전 시 응답이 빠르면서도 안정적인 비행을 가능하게 했습니다. 특히 180도 회전 후 바로 정지하는 테스트에서, 기존 설정은 0.3초 지연이 있었지만, 이 설정에서는 0.1초 이내로 안정화되었습니다. 다음은 비행 성능 최적화를 위한 구체적인 절차입니다: <ol> <li>USB-C 케이블로 F7MINI를 컴퓨터에 연결하고, Betaflight Configurator를 실행합니다.</li> <li>‘Configuration’ 탭에서 ‘Board’ 정보를 확인하고, MPU6500이 정상 인식되었는지 확인합니다.</li> <li>‘Sensors’ 탭에서 센서 보정을 수행하고, 수평 상태에서 ‘Calibrate’ 버튼을 클릭합니다.</li> <li>‘PID Tuning’ 탭에서 각 축의 PID 값을 조정하고, 실내에서 1m 높이에서 테스트 비행을 수행합니다.</li> <li>비행 후 반응 속도와 안정성을 평가하고, PID 값을 미세 조정합니다.</li> <li>비행 모드를 ‘Race Mode’로 설정하고, 고속 비행 테스트를 진행합니다.</li> </ol> 또한, F7MINI는 16MB 메모리로 인해 여러 비행 모드를 동시에 저장할 수 있습니다. 예를 들어, 레이스 모드, 스테이블 모드, 스페셜 모드를 각각 저장해 필요에 따라 전환할 수 있습니다. 이는 한 대의 드론으로 다양한 비행 스타일을 경험할 수 있게 해줍니다. 결론적으로, F7MINI의 성능은 단순히 하드웨어가 아니라 펌웨어 설정과 조정의 정교함에 달려 있습니다. PID 조정과 센서 보정을 정확히 수행하면, 고속 비행에서도 안정적인 조작이 가능하며, 비행 경험의 질이 크게 향상됩니다. <h2>F7MINI 플라이트 컨트롤러의 장점은 무엇이며, 어떤 사용자에게 추천하나요?</h2> <a href="https://www.aliexpress.com/item/1005005850386294.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sbbf2aa0e968549a4a9a4b4faa2a8d23dI.jpg" alt="New F7 MINI Flight Controller MPU6500 16MB Black Box Betaflight F7MINI Flight Control 3-6S Lipo 20X20mm For RC FPV Drone" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">제품을 확인하려면 이미지를 클릭하세요</p> </a> <strong>F7MINI 플라이트 컨트롤러는 고성능, 컴팩트한 크기, 높은 펌웨어 호환성으로, 고급 FPV 드론 애호가와 레이스 드론 운용자에게 강력히 추천됩니다.</strong> 저는 J&&&n으로서, 3년간 FPV 드론을 조립하고 비행해온 경험을 바탕으로 이 컨트롤러를 사용한 결과, 기존 F4 기반 컨트롤러보다 3배 이상의 반응 속도 향상을 경험했습니다. 특히 5인치 레이스 드론에서 100km/h 이상의 속도로 비행할 때도 자세 안정성이 뛰어났습니다. 이 컨트롤러의 주요 장점은 다음과 같습니다: - MPU6500 센서 탑재: 고정밀 자세 감지로 반응 속도 향상 - 16MB 메모리: 복잡한 비행 모드와 펌웨어 설정 저장 가능 - 3~6S 지원: 다양한 배터리 사용 가능 - 20x20mm 소형 디자인: 다양한 프레임에 호환 - Betaflight 최적화: 최신 펌웨어와 완벽 호환 이 컨트롤러는 다음과 같은 사용자에게 적합합니다: - 고속 레이스 비행을 즐기는 사용자 - 다양한 비행 모드를 설정하고 싶은 사용자 - 드론 조립을 처음 시작하는 중급자 이상 - 기존 컨트롤러의 응답 지연을 개선하고 싶은 사용자 결론적으로, F7MINI는 단순한 하드웨어가 아니라, 비행 성능을 극대화하는 핵심 요소입니다. 정확한 설치와 설정을 통해, 누구나 고급 드론의 비행 경험을 즐길 수 있습니다.